Display system FSM main file. More...
#include <stdlib.h>#include <stdio.h>#include "port_display.h"#include "port_system.h"#include "fsm.h"#include "fsm_display.h"Data Structures | |
| struct | fsm_display_t |
| Structure of the Display FSM. More... | |
Functions | |
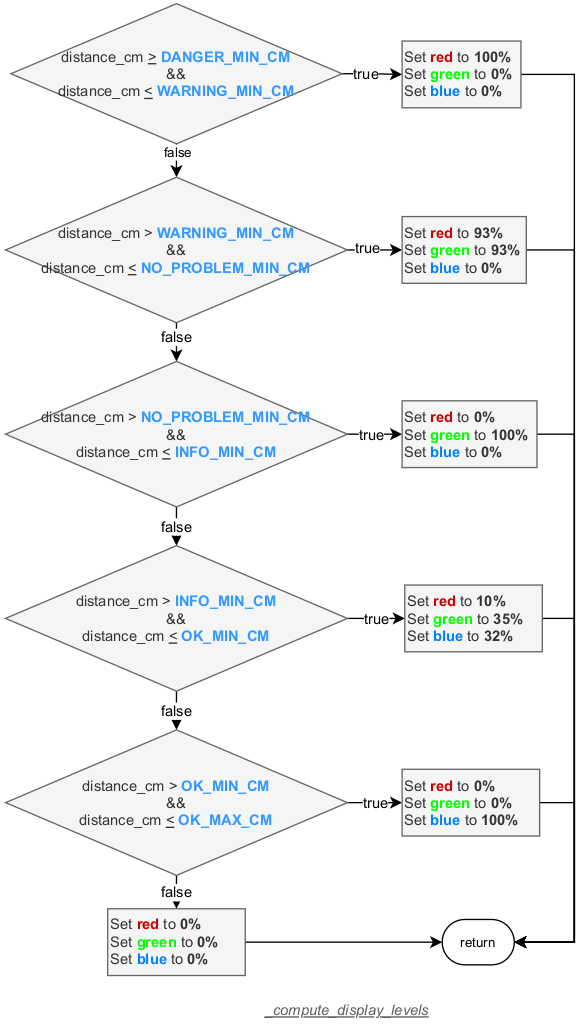
| void | _compute_display_levels (rgb_color_t *p_color, int32_t distance_cm) |
| Set color levels of the RGB LEDs according to the distance. More... | |
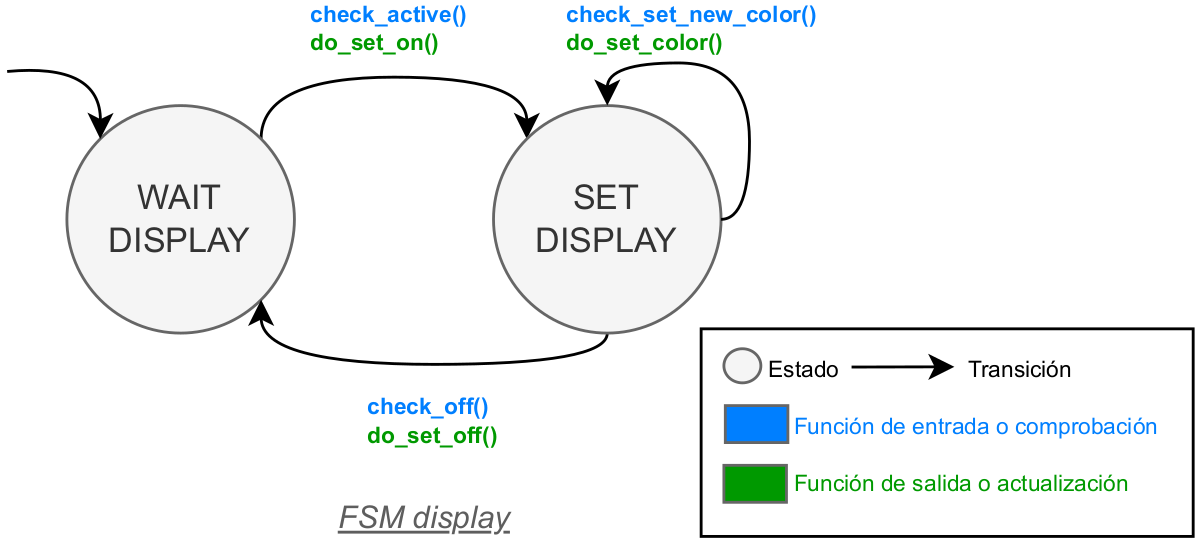
| static bool | check_set_new_color (fsm_t *p_this) |
| Check if a new color has to be set. More... | |
| static bool | check_active (fsm_t *p_this) |
| Check if the display is set to be active (ON), independently if it is idle or not. More... | |
| static bool | check_off (fsm_t *p_this) |
| Check if the display is set to be inactive (OFF). More... | |
| static void | do_set_on (fsm_t *p_this) |
| Turn the display system ON for the first time. More... | |
| static void | do_set_color (fsm_t *p_this) |
| Set the color of the RGB LED according to the distance measured by the ultrasound sensor. More... | |
| static void | do_set_off (fsm_t *p_this) |
| Turn the display system OFF. More... | |
| static void | fsm_display_init (fsm_display_t *p_fsm_display, uint32_t display_id) |
| Initialize a display system FSM. More... | |
| fsm_display_t * | fsm_display_new (uint32_t display_id) |
| Create a new display FSM. More... | |
| void | fsm_display_destroy (fsm_display_t *p_fsm) |
| Destroy a display FSM. More... | |
| void | fsm_display_fire (fsm_display_t *p_fsm) |
| Fire the display FSM. More... | |
| void | fsm_display_set_distance (fsm_display_t *p_fsm, uint32_t distance_cm) |
| Set the display system to show the distance in cm. More... | |
| bool | fsm_display_get_status (fsm_display_t *p_fsm) |
| Get the status of the display FSM. More... | |
| void | fsm_display_set_status (fsm_display_t *p_fsm, bool status) |
| Set the status of the display FSM. More... | |
| bool | fsm_display_check_activity (fsm_display_t *p_fsm) |
| Check if the display system is active. More... | |
| fsm_t * | fsm_display_get_inner_fsm (fsm_display_t *p_fsm) |
| Get the inner FSM of the display. More... | |
| uint32_t | fsm_display_get_state (fsm_display_t *p_fsm) |
| Get the state of the display FSM. More... | |
| void | fsm_display_set_state (fsm_display_t *p_fsm, int8_t state) |
| Set the state of the display FSM. More... | |
Variables | |
| static fsm_trans_t | fsm_trans_display [] |
| Array representing the transitions table of the FSM display. More... | |
Detailed Description
Display system FSM main file.
- Date
- 2025-01-01
Function Documentation
◆ _compute_display_levels()
| void _compute_display_levels | ( | rgb_color_t * | p_color, |
| int32_t | distance_cm | ||
| ) |
Set color levels of the RGB LEDs according to the distance.
This function sets the levels of an RGB LED according to the distance measured by the ultrasound sensor. This RGB LED structure is later passed to the port_display_set_rgb() function to set the color of the RGB LED.
- Warning
- Be careful! The RGB LED has a maximum value of
PORT_DISPLAY_RGB_MAX_VALUE. The duty cycle of the PWM signal must be set according to the levels of the RGB LED.
TODO alumnos:
✅ 1. Set the levels of the RGB LED according to the distance measured by the ultrasound sensor. To do so, follow the flowchart:
- Parameters
-
p_color Pointer to an rgb_color_tstruct that will store the levels of the RGB LED.distance_cm Distance measured by the ultrasound sensor in centimeters.
◆ check_active()
|
static |
Check if the display is set to be active (ON), independently if it is idle or not.
TODO alumnos:
✅ 1. Return the flag
status
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_display_t.
- Returns
- true If the display system has been indicated to be active independently if it is idle or not.
- false If the display system has been indicated to be inactive.
◆ check_off()
|
static |
Check if the display is set to be inactive (OFF).
TODO alumnos:
✅ 1. Return the inverse of the flag
status
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_display_t.
- Returns
- true If the display system has been indicated to be inactive.
- false If the display system has been indicated to be active.
◆ check_set_new_color()
|
static |
Check if a new color has to be set.
TODO alumnos:
✅ 1. Return the flag
new_color
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_display_t.
- Returns
- true If a new color has to be set
- false If a new color does not have to be set
◆ do_set_color()
|
static |
Set the color of the RGB LED according to the distance measured by the ultrasound sensor.
TODO alumnos:
✅ 1. Compute the levels of the RGB LEDs according to the distance and set the display level
✅ 2. Call functionport_display_set_rgb()with the RGB LED ID and the color
✅ 3. Reset the flagnew_colorto indicate that the color has been set
✅ 4. Set the display system to idle. In this case, the display system is active, but while the distance is not changed, the display system is idle and can enter in a low power mode
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_display_t.
◆ do_set_off()
|
static |
Turn the display system OFF.
TODO alumnos:
✅ 1. Call function
port_display_set_rgb()with the RGB LED ID with no color (COLOR_OFF).
✅ 2. Reset the flagidleto indicate that the display system is not idle
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_display_t.
◆ do_set_on()
|
static |
Turn the display system ON for the first time.
- Warning
- In this version the display starts ON with no color. This is: the LED is turned ON but no color is set. In future versions you can set a default color at the beginning.
TODO alumnos:
✅ 1. Call function
port_display_set_rgb()with the RGB LED ID with no color (all the duty cycles to 0).
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_display_t.
◆ fsm_display_check_activity()
| bool fsm_display_check_activity | ( | fsm_display_t * | p_fsm | ) |
Check if the display system is active.
This function checks if the display system is active.
TODO alumnos
✅ 1. Return
trueif the display system is active and it is not idle. Otherwise, returnfalse.
- Parameters
-
p_fsm Pointer to an fsm_display_tstruct.
- Returns
- true If the display system is active.
- false If the display system is inactive.
◆ fsm_display_destroy()
| void fsm_display_destroy | ( | fsm_display_t * | p_fsm | ) |
Destroy a display FSM.
This function destroys a display FSM and frees the memory.
TODO alumnos:
✅ 1. Implement this function analogously to the
fsm_display_destroy()function.
- Parameters
-
p_fsm Pointer to an fsm_display_tstruct.
◆ fsm_display_fire()
| void fsm_display_fire | ( | fsm_display_t * | p_fsm | ) |
Fire the display FSM.
This function is used to fire the display FSM. It is used to check the transitions and execute the actions of the display FSM.
TODO alumnos:
✅ 1. Call the
fsm_fire()function. Pass the address of thefsm_tstruct.
- Parameters
-
p_fsm Pointer to an fsm_display_tstruct.
◆ fsm_display_get_inner_fsm()
| fsm_t* fsm_display_get_inner_fsm | ( | fsm_display_t * | p_fsm | ) |
Get the inner FSM of the display.
This function returns the inner FSM of the display.
💡 This function is important because the struct is private and external functions such as those of the unit tests cannot access the inner FSM directly.
TODO alumnos:
✅ 1. Return the address of the
ffield of the struct.
- Parameters
-
p_fsm Pointer to an fsm_display_tstruct.
- Returns
- fsm_t* Pointer to the inner FSM.
◆ fsm_display_get_state()
| uint32_t fsm_display_get_state | ( | fsm_display_t * | p_fsm | ) |
Get the state of the display FSM.
This function returns the current state of the display FSM.
💡 This function is important because the struct is private and external functions such as those of the unit tests cannot access the state of the FSM directly.
TODO alumnos:
✅ 1. Retrieve and return the field
current_stateof the FSM (fieldfof the struct).
- Parameters
-
p_fsm Pointer to an fsm_display_tstruct.
- Returns
- uint32_t Current state of the display FSM.
◆ fsm_display_get_status()
| bool fsm_display_get_status | ( | fsm_display_t * | p_fsm | ) |
Get the status of the display FSM.
This function returns the status of the display system. This function might be used for testing and debugging purposes.
TODO alumnos:
✅ 1. Retrieve and return the field
status.
- Parameters
-
p_fsm Pointer to an fsm_display_tstruct.
- Returns
- true If the display system has been indicated to be active.
- false If the display system has been indicated to be paused.
◆ fsm_display_init()
|
static |
Initialize a display system FSM.
This function initializes the default values of the FSM struct and calls to the port to initialize the associated HW given the ID.
The FSM stores the display level of the display system. The user should set it using the function fsm_display_set_distance().
- Attention
- This display system is agnostic to the ultrasound sensor or any other sensor. It only shows the status of the display system set by the user. It does not matter if the display is for a parking sensor, a door sensor, or any other sensor. The display system only shows a status according to a distance set by the user.
The FSM contains information of the RGB LED ID. This ID is a unique identifier that is managed by the user in the port. That is where the user provides identifiers and HW information for all the RGB LEDs on his system. The FSM does not have to know anything of the underlying HW.
- Note
- Both unit and integration tests (example) are provided for this ultrasound library are available in this GitHub repository: https://github.com/sdg2DieUpm/urbanite/tree/urbanite_v3_test
TODO alumnos:
✅ 1. Call the
fsm_init()to initialize the FSM. Pass the address of thefsm_tstruct and the transition table.
✅ 2. Initialize the ''distance_id. \n ✅ 3. Set thedistance_cmto-1or any other invalid value in the range of the distance. \n ✅ 4. Initialize the flagsnew_color,status, andidletofalse. \n ✅ 5. Call functionport_display_init()` to initialize the HW.
- Parameters
-
p_fsm_display Pointer to the display FSM. display_id Unique display identifier number.
◆ fsm_display_new()
| fsm_display_t* fsm_display_new | ( | uint32_t | display_id | ) |
Create a new display FSM.
This function creates a new display FSM with the given display ID.
- Parameters
-
display_id Display ID. Must be unique.
- Returns
- fsm_display_t* Pointer to the display FSM.
◆ fsm_display_set_distance()
| void fsm_display_set_distance | ( | fsm_display_t * | p_fsm, |
| uint32_t | distance_cm | ||
| ) |
Set the display system to show the distance in cm.
This function is used to set the display system to show the distance in cm.
TODO alumnos:
✅ 1. Set the distance in cm in the display system FSM.
✅ 2. Set thenew_colorfield accordingly to indicate that a new color has to be set.
- Parameters
-
p_fsm Pointer to an fsm_display_tstruct.distance_cm Distance in cm to show in the display system.
◆ fsm_display_set_state()
| void fsm_display_set_state | ( | fsm_display_t * | p_fsm, |
| int8_t | state | ||
| ) |
Set the state of the display FSM.
This function sets the current state of the display FSM.
💡 This function is important because the struct is private and external functions such as those of the unit tests cannot access the state of the FSM directly.
- Parameters
-
p_fsm Pointer to an fsm_display_tstruct.state New state of the display FSM.
◆ fsm_display_set_status()
| void fsm_display_set_status | ( | fsm_display_t * | p_fsm, |
| bool | pause | ||
| ) |
Set the status of the display FSM.
This function is used to set the status of the display system. Indicating if the display system is active or paused.
TODO alumnos:
✅ 1. Update the field
statuswith the received value
- Parameters
-
p_fsm Pointer to an fsm_display_tstruct.pause Status of the display system. trueif the display system is paused,falseif the display system is active.
Variable Documentation
◆ fsm_trans_display
|
static |
Array representing the transitions table of the FSM display.