Ultrasound sensor FSM main file. More...
#include <stdlib.h>#include <string.h>#include "port_ultrasound.h"#include "port_system.h"#include "fsm.h"#include "fsm_ultrasound.h"Data Structures | |
| struct | fsm_ultrasound_t |
| Structure to define the Ultrasound FSM. More... | |
Functions | |
| int | _compare (const void *a, const void *b) |
| Compare function to sort arrays. More... | |
| static bool | check_on (fsm_t *p_this) |
| Check if the ultrasound sensor is active and ready to start a new measurement. More... | |
| static bool | check_off (fsm_t *p_this) |
| Check if the ultrasound sensor has been set to be inactive (OFF). More... | |
| static bool | check_trigger_end (fsm_t *p_this) |
| Check if the ultrasound sensor has finished the trigger signal. More... | |
| static bool | check_echo_init (fsm_t *p_this) |
| Check if the ultrasound sensor has received the init (rising edge in the input capture) of the echo signal. More... | |
| static bool | check_echo_received (fsm_t *p_this) |
| Check if the ultrasound sensor has received the end (falling edge in the input capture) of the echo signal. More... | |
| static bool | check_new_measurement (fsm_t *p_this) |
| Check if a new measurement is ready. More... | |
| static void | do_start_measurement (fsm_t *p_this) |
| Start a measurement of the ultrasound transceiver for the first time after the FSM is started. More... | |
| static void | do_start_new_measurement (fsm_t *p_this) |
| Start a new measurement of the ultrasound transceiver. More... | |
| static void | do_stop_trigger (fsm_t *p_this) |
| Stop the trigger signal of the ultrasound sensor. More... | |
| static void | do_set_distance (fsm_t *p_this) |
| Set the distance measured by the ultrasound sensor. More... | |
| static void | do_stop_measurement (fsm_t *p_this) |
| Stop the ultrasound sensor. More... | |
| static void | fsm_ultrasound_init (fsm_ultrasound_t *p_fsm_ultrasound, uint32_t ultrasound_id) |
| Initialize a ultrasound FSM. More... | |
| fsm_ultrasound_t * | fsm_ultrasound_new (uint32_t ultrasound_id) |
| Create a new ultrasound FSM. More... | |
| void | fsm_ultrasound_destroy (fsm_ultrasound_t *p_fsm) |
| Destroy an ultrasound FSM. More... | |
| void | fsm_ultrasound_fire (fsm_ultrasound_t *p_fsm) |
| Fire the ultrasound FSM. More... | |
| uint32_t | fsm_ultrasound_get_distance (fsm_ultrasound_t *p_fsm) |
| Return the distance of the last object detected by the ultrasound sensor.a64l. More... | |
| void | fsm_ultrasound_stop (fsm_ultrasound_t *p_fsm) |
| Stop the ultrasound sensor. More... | |
| void | fsm_ultrasound_start (fsm_ultrasound_t *p_fsm) |
| Start the ultrasound sensor. More... | |
| bool | fsm_ultrasound_get_status (fsm_ultrasound_t *p_fsm) |
| Get the status of the ultrasound transceiver FSM. More... | |
| void | fsm_ultrasound_set_status (fsm_ultrasound_t *p_fsm, bool status) |
Set the status of the ultrasound sensor. true means that the ultrasound sensor is active and a distance measurement must be performed. false means that the ultrasound sensor is inactive. More... | |
| bool | fsm_ultrasound_get_ready (fsm_ultrasound_t *p_fsm) |
| Get the ready flag of the trigger signal in the ultrasound HW. More... | |
| bool | fsm_ultrasound_get_new_measurement_ready (fsm_ultrasound_t *p_fsm) |
| Return the flag that indicates if a new measurement is ready. More... | |
| fsm_t * | fsm_ultrasound_get_inner_fsm (fsm_ultrasound_t *p_fsm) |
| Get the inner FSM of the ultrasound. More... | |
| uint32_t | fsm_ultrasound_get_state (fsm_ultrasound_t *p_fsm) |
| Get the state of the ultrasound FSM. More... | |
| void | fsm_ultrasound_set_state (fsm_ultrasound_t *p_fsm, int8_t state) |
| Set the state of the ultrasound FSM. More... | |
| bool | fsm_ultrasound_check_activity (fsm_ultrasound_t *p_fsm) |
| Check if the ultrasound sensor is doing a distance measurement. More... | |
Variables | |
| static fsm_trans_t | fsm_trans_ultrasound [] |
| Array representing the transitions table of the FSM ultrasound. More... | |
Detailed Description
Ultrasound sensor FSM main file.
- Date
- 2025-01-01
Function Documentation
◆ _compare()
| int _compare | ( | const void * | a, |
| const void * | b | ||
| ) |
Compare function to sort arrays.
This function is used to compare two elements. It will be used for the qsort() function to sort the array of distances.
- Parameters
-
a Pointer to the first element to compare. b Pointer to the second element to compare.
- Returns
- int Result of the comparison.
◆ check_echo_init()
|
static |
Check if the ultrasound sensor has received the init (rising edge in the input capture) of the echo signal.
TODO alumnos:
✅ 1. Call function
port_ultrasound_get_echo_init_tick()to retrieve the time tick of the echo signal
✅ 2. Returntrueif the time tick is higher than 0. Otherwise, returnfalse
- Parameters
-
p_this Pointer to an fsm_tstruct that contains anfsm_ultrasound_t.
- Returns
- true
- false
◆ check_echo_received()
|
static |
Check if the ultrasound sensor has received the end (falling edge in the input capture) of the echo signal.
TODO alumnos:
✅ 1. Call function
port_ultrasound_get_echo_received()to retrieve and return the status of the echo signal: it will be true if both the init and end ticks have been received.
- Parameters
-
p_this Pointer to an fsm_tstruct that contains anfsm_ultrasound_t.
- Returns
- true
- false
◆ check_new_measurement()
|
static |
Check if a new measurement is ready.
TODO alumnos:
✅ 1. Call function
port_ultrasound_get_trigger_ready()to retrieve and return the status of the trigger signal. If it istruemeans that the ultrasound sensor is ready to start a new measurement.
- Parameters
-
p_this Pointer to an fsm_tstruct that contains anfsm_ultrasound_t.
- Returns
- true
- false
◆ check_off()
|
static |
Check if the ultrasound sensor has been set to be inactive (OFF).
TODO alumnos:
✅ 1. Return the inverse of the flag
status
- Parameters
-
p_this Pointer to an fsm_tstruct that contains anfsm_ultrasound_t.
- Returns
- true
- false
◆ check_on()
|
static |
Check if the ultrasound sensor is active and ready to start a new measurement.
TODO alumnos:
✅ 1. Call function
port_ultrasound_get_trigger_ready()and retrieve the status of the trigger signal
✅ 2. Returntrueif the ultrasound sensor flag is active and ready to start a new measurement. Otherwise, returnfalse
- Parameters
-
p_this Pointer to an fsm_tstruct that contains anfsm_ultrasound_t.
- Returns
- true
- false
◆ check_trigger_end()
|
static |
Check if the ultrasound sensor has finished the trigger signal.
TODO alumnos:
✅ 1. Call function
port_ultrasound_get_trigger_end()and retrieve the status of the trigger signal and return it. It will betrueif the time to trigger the ultrasound sensor has finished.
- Parameters
-
p_this Pointer to an fsm_tstruct that contains anfsm_ultrasound_t.
- Returns
- true
- false
◆ do_set_distance()
|
static |
Set the distance measured by the ultrasound sensor.
This function is called when the ultrasound sensor has received the echo signal. It calculates the distance in cm and stores it in the array of distances.
When the array is full, it computes the median of the array and resets the index of the array.
TODO alumnos:
✅ 1. Retrieve the echo init tick, echo end tick, and echo overflows from the ultrasound sensor.
✅ 2. Calculate the time that the sound has taken to go back and forth by using the equation that relates the time with the distance and the number of overflows.
✅ 3. Calculate the distance in cm taking into account the speed of sound.
✅ 4. Store the distance in the array of distances in the position of the index.
✅ 5. If the array is full, sort the array by calling the functionqsort(). This function sorts the array in ascending order and receives the array, the number of elements of the array (FSM_ULTRASOUND_NUM_MEASUREMENTS), the size of each element (sizeof(uint32_t)), and the compare function.
✅ 6. If the array is full, compute the median of the array and store it in the field
distance_cm. Make sure to consider if the number of measurementsFSM_ULTRASOUND_NUM_MEASUREMENTSis even or odd.
✅ 7. If the array is full, set the flagnew_measurementto indicate that a new measurement is ready.
✅ 8. Increase the distance index. If the index is higher or equalFSM_ULTRASOUND_NUM_MEASUREMENTS, reset the index. You can use the modulo operator to do this.
✅ 9. Call functionport_ultrasound_stop_echo_timer()to stop the timer that controls the input capture of the echo signal.
✅ 10. Call functionport_ultrasound_reset_echo_ticks()to reset the time ticks of the echo signal.
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_ultrasound_t.
◆ do_start_measurement()
|
static |
Start a measurement of the ultrasound transceiver for the first time after the FSM is started.
TODO alumnos:
✅ 1. Call function
port_ultrasound_start_measurement()with the right parameters to start a new measurement.
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_ultrasound_t.
◆ do_start_new_measurement()
|
static |
Start a new measurement of the ultrasound transceiver.
This function is called when the ultrasound sensor has finished a measurement and is ready to start a new one.
TODO alumnos:
✅ 1. Call function
do_start_measurement()to start a new measurement.
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_ultrasound_t.
◆ do_stop_measurement()
|
static |
Stop the ultrasound sensor.
This function is called when the ultrasound sensor is stopped. It stops the ultrasound sensor and resets the echo ticks.
TODO alumnos:
✅ 1. Call function
port_ultrasound_stop_ultrasound()with the right parameters to stop the ultrasound sensor.
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_ultrasound_t.
◆ do_stop_trigger()
|
static |
Stop the trigger signal of the ultrasound sensor.
This function is called when the time to trigger the ultrasound sensor has finished. It stops the trigger signal and the trigger timer.
TODO alumnos:
✅ 1. Call function
port_ultrasound_stop_trigger_timer()to stop the timer that controls the trigger signal.
✅ 2. Call functionport_ultrasound_set_trigger_end()to set the trigger signal to low.
- Parameters
-
p_this Pointer to an fsm_tstruct than contains anfsm_ultrasound_t.
◆ fsm_ultrasound_check_activity()
| bool fsm_ultrasound_check_activity | ( | fsm_ultrasound_t * | p_fsm | ) |
Check if the ultrasound sensor is doing a distance measurement.
The ultrasound sensor is always inactive because all the transitions are due to HW interrupts.
TODO alumnos Version 4:
✅ 1. Return
falsealways.
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.
- Returns
- true
- false
◆ fsm_ultrasound_destroy()
| void fsm_ultrasound_destroy | ( | fsm_ultrasound_t * | p_fsm | ) |
Destroy an ultrasound FSM.
This function destroys an ultrasound transceiver FSM and frees the memory.
TODO alumnos:
✅ 1. Implement this function analogously to the
fsm_button_destroy()function.
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.
◆ fsm_ultrasound_fire()
| void fsm_ultrasound_fire | ( | fsm_ultrasound_t * | p_fsm | ) |
Fire the ultrasound FSM.
This function is used to fire the ultrasound FSM. It is used to check the transitions and execute the actions of the ultrasound FSM.
TODO alumnos:
✅ 1. Call function
fsm_fire()with the received pointer tofsm_t
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.
◆ fsm_ultrasound_get_distance()
| uint32_t fsm_ultrasound_get_distance | ( | fsm_ultrasound_t * | p_fsm | ) |
Return the distance of the last object detected by the ultrasound sensor.a64l.
The function also resets the field new_measurement to indicate that the distance has been read.
TODO alumnos:
✅ 1. Retrieve and return the field
distance_cm.
✅ 2. Reset the fieldnew_measurement.
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.
- Returns
- uint32_t Distance measured by the ultrasound sensor in centimeters.
◆ fsm_ultrasound_get_inner_fsm()
| fsm_t* fsm_ultrasound_get_inner_fsm | ( | fsm_ultrasound_t * | p_fsm | ) |
Get the inner FSM of the ultrasound.
This function returns the inner FSM of the ultrasound.
💡 This function is important because the struct is private and external functions such as those of the unit tests cannot access the inner FSM directly.
TODO alumnos:
✅ 1. Return the address of the
ffield of the struct.
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.
- Returns
- fsm_t* Pointer to the inner FSM.
◆ fsm_ultrasound_get_new_measurement_ready()
| bool fsm_ultrasound_get_new_measurement_ready | ( | fsm_ultrasound_t * | p_fsm | ) |
Return the flag that indicates if a new measurement is ready.
TODO alumnos:
✅ 1. Retrieve and return the field
new_measurement.
- Parameters
-
p_fsm Pointer to the ultrasound FSM.
- Returns
- true
- false
◆ fsm_ultrasound_get_ready()
| bool fsm_ultrasound_get_ready | ( | fsm_ultrasound_t * | p_fsm | ) |
Get the ready flag of the trigger signal in the ultrasound HW.
This function returns the ready flag of trigger signal in the ultrasound HW. This function might be used for testing and debugging purposes.
TODO alumnos:
✅ 1. Call function
port_ultrasound_get_trigger_ready()with the ultrasound ID and return the result.
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.
- Returns
- true If the
portindicates that the trigger signal is ready to start a new measurement. -
false If the
portindicates that the trigger signal is not ready to start a new measurement.
◆ fsm_ultrasound_get_state()
| uint32_t fsm_ultrasound_get_state | ( | fsm_ultrasound_t * | p_fsm | ) |
Get the state of the ultrasound FSM.
This function returns the current state of the ultrasound FSM.
💡 This function is important because the struct is private and external functions such as those of the unit tests cannot access the state of the FSM directly.
TODO alumnos:
✅ 1. Retrieve and return the field
current_stateof the FSM (fieldfof the struct).
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.
- Returns
- uint32_t Current state of the ultrasound FSM.
◆ fsm_ultrasound_get_status()
| bool fsm_ultrasound_get_status | ( | fsm_ultrasound_t * | p_fsm | ) |
Get the status of the ultrasound transceiver FSM.
This function returns the status of the ultrasound. This function might be used for testing and debugging purposes.
TODO alumnos:
✅ 1. Retrieve and return the field
status.
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.
- Returns
- true If the ultrasound system has been indicated to be active.
- false If the ultrasound system has been indicated to be paused.
◆ fsm_ultrasound_init()
|
static |
Initialize a ultrasound FSM.
This function initializes the default values of the FSM struct and calls to the port to initialize the associated HW given the ID.
The FSM stores the distance of the last ultrasound trigger. The user should ask for it using the function fsm_ultrasound_get_distance().
The FSM contains information of the ultrasound ID. This ID is a unique identifier that is managed by the user in the port. That is where the user provides identifiers and HW information for all the ultrasounds on his system. The FSM does not have to know anything of the underlying HW.
- Note
- Both unit and integration tests (example) are provided for this ultrasound library are available in this GitHub repository: https://github.com/sdg2DieUpm/urbanite/tree/urbanite_v2_test
TODO alumnos:
✅ 1. Call the
fsm_init()to initialize the FSM. Pass the address of thefsm_tstruct and the transition table.
✅ 2. Initialize the fields all the fields of thep_fsm:distance_cm,distance_idx, anddistance_arr, to 0. To do the later, you can use the functionmemset(). ✅ 3. Initialize the fieldstatusandnew_measurementtofalse.
✅ 4. Call functionport_ultrasound_init()to initialize the HW of the ultrasound sensor.
- Note
- The main program and the
portare the only ones that manage and stablish the ID. The ultrasound FSM acts as a man-in-the-middle but this library does not handles the ultrasound IDs.
- Parameters
-
p_fsm_ultrasound Pointer to the ultrasound FSM. ultrasound_id Unique ultrasound identifier number.
◆ fsm_ultrasound_new()
| fsm_ultrasound_t* fsm_ultrasound_new | ( | uint32_t | ultrasound_id | ) |
Create a new ultrasound FSM.
This function creates a new ultrasound transceiver FSM with the given ultrasound ID.
- Parameters
-
ultrasound_id Ultrasound ID. Must be unique.
- Returns
- fsm_ultrasound_t* Pointer to the ultrasound FSM.
◆ fsm_ultrasound_set_state()
| void fsm_ultrasound_set_state | ( | fsm_ultrasound_t * | p_fsm, |
| int8_t | state | ||
| ) |
Set the state of the ultrasound FSM.
This function sets the current state of the ultrasound FSM.
💡 This function is important because the struct is private and external functions such as those of the unit tests cannot access the state of the FSM directly.
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.state New state of the ultrasound FSM.
◆ fsm_ultrasound_set_status()
| void fsm_ultrasound_set_status | ( | fsm_ultrasound_t * | p_fsm, |
| bool | status | ||
| ) |
Set the status of the ultrasound sensor. true means that the ultrasound sensor is active and a distance measurement must be performed. false means that the ultrasound sensor is inactive.
TODO alumnos:
✅ 1. Update the field
statuswith the received value
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.status Status of the ultrasound sensor.
◆ fsm_ultrasound_start()
| void fsm_ultrasound_start | ( | fsm_ultrasound_t * | p_fsm | ) |
Start the ultrasound sensor.
This function starts the ultrasound sensor by indicating to the port to start the ultrasound sensor (to reset all timer ticks) and to set the status of the ultrasound sensor to active.
TODO alumnos:
✅ 1. Set the field
status.
✅ 2. Reset the fielddistance_idx.
✅ 3. Reset the fielddistance_cm.
✅ 4. Call functionport_ultrasound_reset_echo_ticks()with the right parameters.
✅ 5. Call functionport_ultrasound_set_trigger_ready()with the right parameters to indicate that the ultrasound sensor is ready to start a new measurement.
✅ 6. Call functionport_ultrasound_start_new_measurement_timer()to force the new measurement timer to start to provoke the first interrupt.
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.
◆ fsm_ultrasound_stop()
| void fsm_ultrasound_stop | ( | fsm_ultrasound_t * | p_fsm | ) |
Stop the ultrasound sensor.
This function stops the ultrasound sensor by indicating to the port to stop the ultrasound sensor (to reset all timer ticks) and to set the status of the ultrasound sensor to inactive.
TODO alumnos:
✅ 1. Reset the field
status.
✅ 2. Call functionport_ultrasound_stop_ultrasound()with the right parameters.
- Parameters
-
p_fsm Pointer to an fsm_ultrasound_tstruct.
Variable Documentation
◆ fsm_trans_ultrasound
|
static |
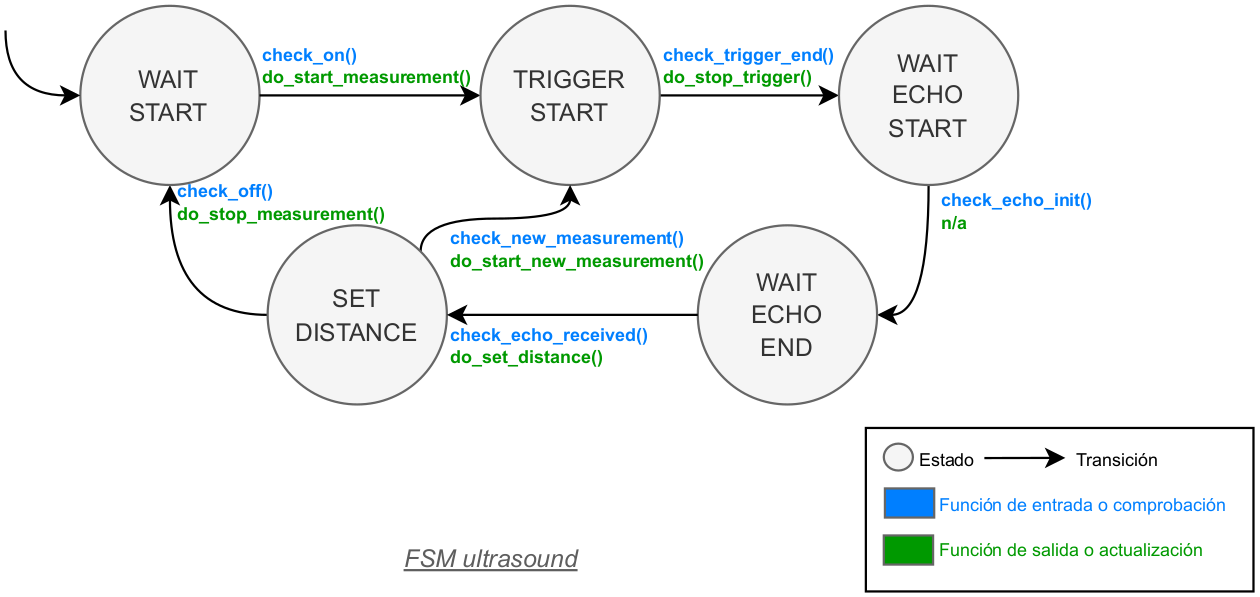
Array representing the transitions table of the FSM ultrasound.
- Warning
- The order of the transitions is important. The FSM will check the transitions in the order they are defined in this array. In state
SET_DISTANCE, the FSM will first check if a new measurement is ready (check_new_measurement()), then if the ultrasound sensor is off (check_off()). If the order is changed, the FSM may not work as expected and may finish measurements before time.